感知机的暴力实现
下面是机器学习的《监督式学习》课程的一篇试读文章,进行了一下重新排版,然后展示在这里。由于格式的限制,缺少了一些习题、可运行的代码、证明、注释等,可能会导致解释差强人意,所以介意的同学可以直接访问感知机的暴力实现,以获得最佳的阅读体验。
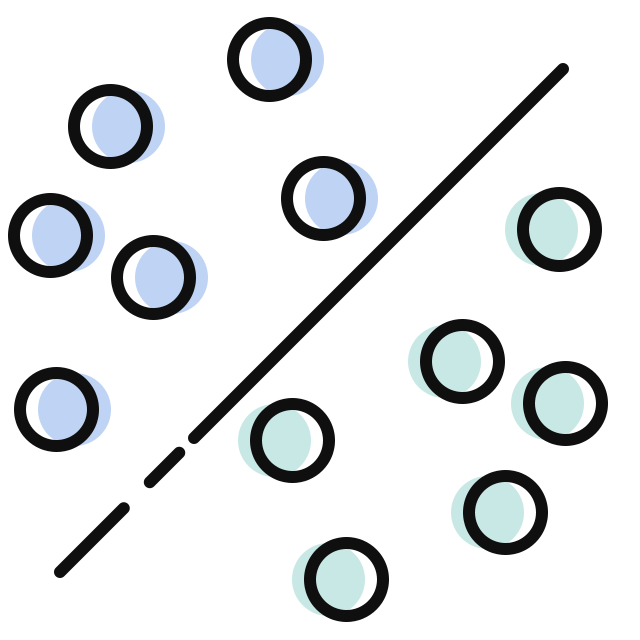
简单来说,感知机就是要找到一条直线(或者说超平面),将两类点分开(下图中的
我们知道,直线(或者超平面)的方程为(下面的
本文就来介绍感知机如何通过一种看似暴力的方法来寻找合适的
首先我们要知道一些前置的结论,下面一一来介绍。
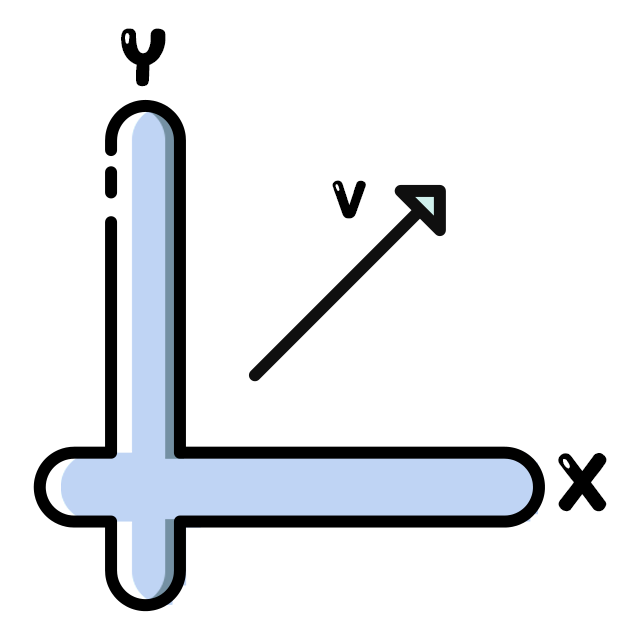
根据
比如二维空间中,
同样的道理,在
-
:在超平面的法向量 所指的一侧 -
:在超平面上 -
:在超平面的法向量 所指的另外一侧
根据上述结论可得:
-
:在直线的法向量 所指的一侧 -
:在直线上 -
:在直线的法向量 所指的另外一侧
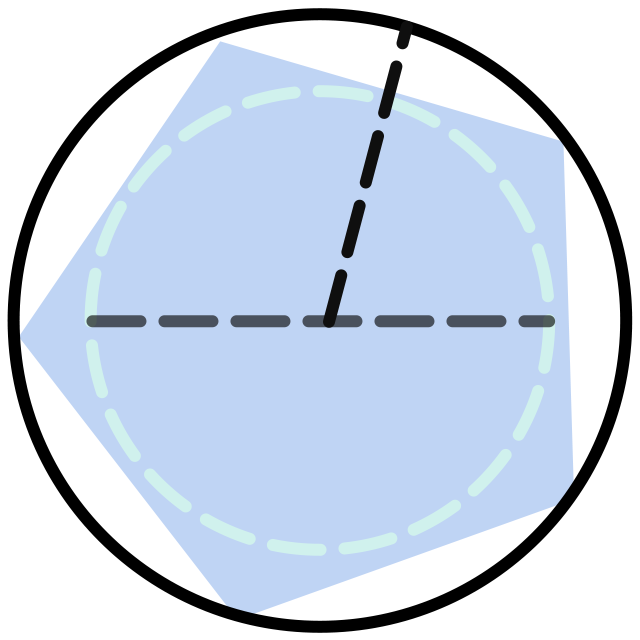
三维空间也是一样的,假设平面
根据上述结论可得:
-
:在平面的法向量 所指的一侧 -
:在平面的法向量 所指的另外一侧
讲了这么多前置,下面开始介绍感知机的暴力实现。第一个问题是,要能判断找到的超平面
下面是用来作例子的数据集,其中
然后随便(对,就是随便,要不怎么叫暴力实现)找一条直线
下面来判断该直线的对错。我们希望标签
同理,分错的点
综上,判断
-
分对:
-
分错:
如果所有的
前面看到
比如下面是标签
那就想办法将法向量拉近一些。根据
所以用
而下面是标签
所以用
总结下,当标签为
此时,只需要令
下面给一个例子来进一步说明该结论。
例 如下图所示:
标签为
解 通过看图,或者进行计算(该直线的法向量为
应该将法向量
修正后的直线为
好了,现在具备需要的知识了,让我们来为
只需要令
纠错后,
可是,原本没有错的
还有错,还得继续:
最后,法向量为
刚才介绍的算法一开始随机找了个超平面,实在太暴力了,下面来规范一下:
(1)令权重向量
所以初始函数为:
(2)顺序遍历数据集,从中得到
(3)如果分错了,即
则进行更正(因为刚开始
(4)转至(2),直到找到合适的
此时可以说,该超平面
语言描述的算法可能有歧义,下面是按照上面步骤实现的代码,可以帮助同学们精确理解感知机的暴力实现: