如何理解矩阵的「秩」?
阅读提示,这篇文章是在 如何理解行列式的本质 的基础上作答的。
先说答案:
- 「秩」是图像经过矩阵变换之后的空间维度
- 「秩」是列空间的维度
下面分别解释这两个答案,前者更直观,而后者是前者的原因。
1 「秩」是图像经过矩阵变换之后的空间维度
这是比较直观的一个角度。

我们通过旋转矩阵$\begin{bmatrix} cos(\theta ) & -sin(\theta ) \\ sin(\theta ) & cos(\theta ) \end{bmatrix}$进行变换:

因此,旋转矩阵的「秩」为2。
我们通过矩阵$\begin{bmatrix} 1 & -1 \\ 1 & -1 \end{bmatrix}$进行变换:

因此,此矩阵的「秩」为1。
我们通过矩阵$\begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix}$进行变换:

因此,此矩阵的「秩」为0。
所以,「秩」是图像经过矩阵变换之后的空间维度。
要解释为什么,我们需要另外一个角度的答案。
2 「秩」是列空间的维度
首先看下什么是列空间。
2.1 列空间
我们通过旋转矩阵来解释什么是列空间:

通过改变$a,b$的值,可以用$a\vec{i'}+b\vec{j'}$来表示二维平面上的所有点:

可以自己动手试试:
所以,列空间就是矩阵的列向量所能张成(即通过$a\vec{i'}+b\vec{j'}$来表示)的空间。
列空间的维度就是「秩」,旋转矩阵的列空间是二维的,所以「秩」就为2。
那么这种定义方式怎么和之前说的「秩」是图像经过矩阵变换之后的空间维度联系起来呢?
2.2 矩阵的变换目标是列空间
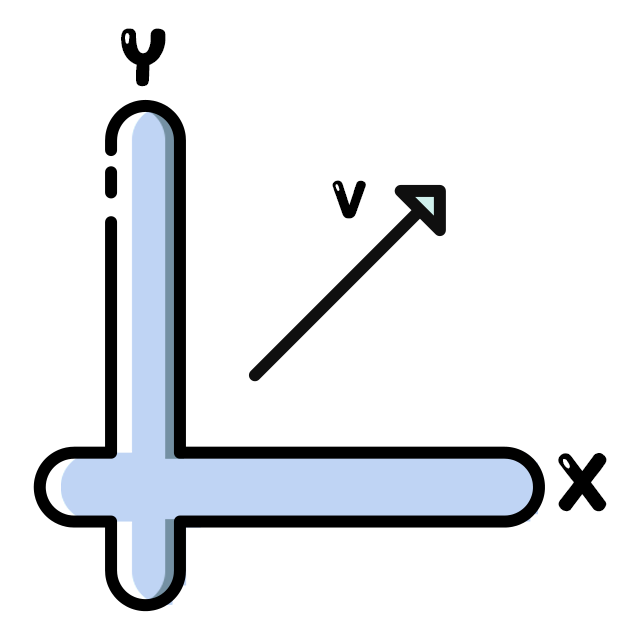
有这么一个矢量:


我把基画出来的原因是因为矩阵变换的其实是基。
举例子来看看,比如旋转(旋转矩阵$T_{rotate}=\begin{bmatrix} cos(\theta ) & -sin(\theta ) \\ sin(\theta ) & cos(\theta ) \end{bmatrix}$):

如果要说详细点,实际上:


2.3 两种定义方式的联系
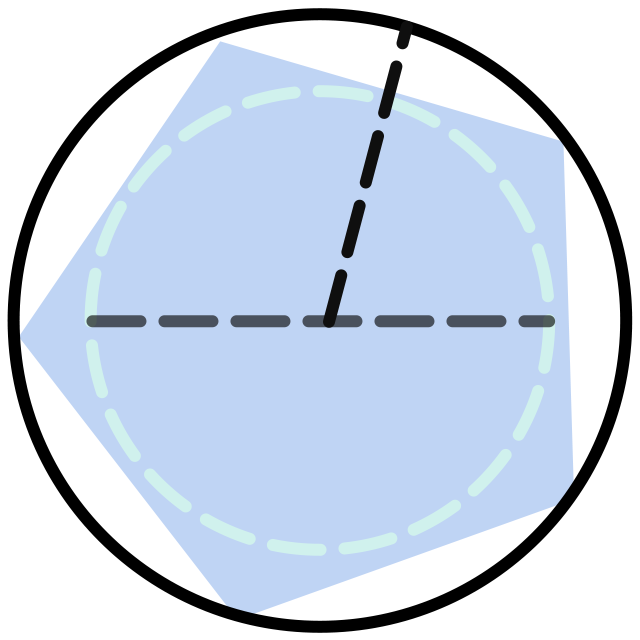
用旋转矩阵对二维的正方形进行线性变换,实际上是一个二维空间到另外一个二维空间的变换:

对于矩阵$\begin{bmatrix} 1 & -1 \\ 1 & -1 \end{bmatrix}$,他的列空间是一维的:

因此,这个矩阵的「秩」就是1,用它对二维的正方形进行线性变换,实际上是一个二维空间到另外一个一维空间的变换:

同理,矩阵$\begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix}$的列空间是个点,因此它的「秩」就是0。
3 关于严格性的一个问题
上面我说矩阵的「秩」是列空间的维度,这并非完全正确的。
列空间的维度准确来说,是「列秩」,行空间的维度是「行秩」,但是,还好有,「秩」=「列秩」=「行秩」是恒成立的。所以直接把「列秩」称为「秩」也不算错误。
4 最后
了解了秩,就很容易回答下面这个问题。
我们知道矩阵是做线性变换的,比如说一个$3\times 2$的矩阵:

从图像上看:

被一个$3\times 2$的矩阵变换到了三维空间:

那么,通过$3\times 2$的矩阵能否把一个二维正方形:

变换为一个三维正方体呢?