方向角的余弦称为 方向余弦 ,其值分别为及。
所以,可通过计算得到:
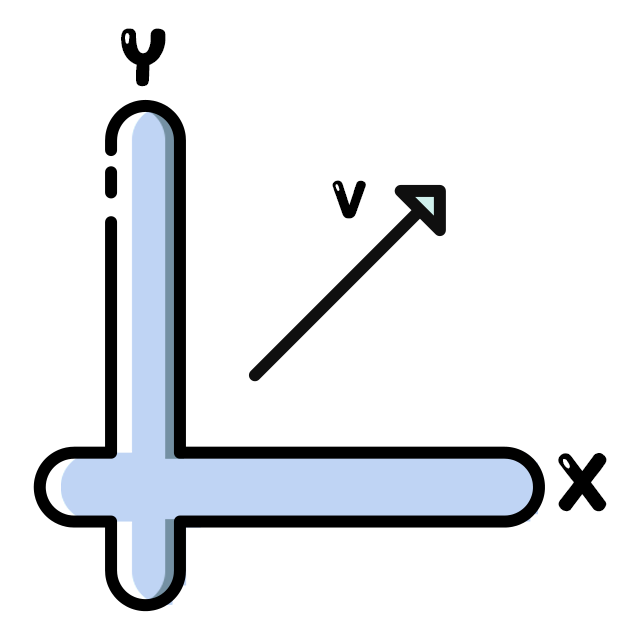
如下所示,用的方向余弦可构造出向量:
观察上面的构造过程可知,的长度为,方向与相同,所以称其为的 单位方向向量 ,如下图所示。
方向角的余弦称为 方向余弦 ,其值分别为、及。